HEMT-High Linearity GaN Transistor
Principal Investigator: Professor Fay
Other Contributor: Nivedhita Venkatesan
AWaRE REU Researcher: Fuwei Huang, University of Colorado Denver
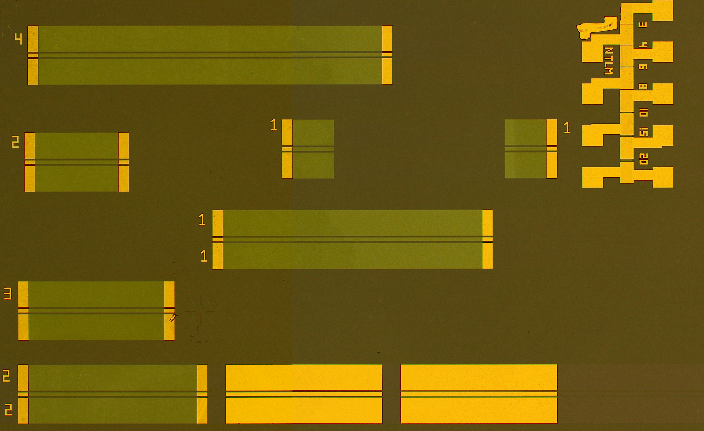
Project Description: Novel transistor designs for improved linearity in GaN-based FETs are being explored for their potential to improve dynamic range in mm-wave low noise amplifiers (LNAs). This project includes device design, modeling, fabrication, and characterization of devices, as well as the design of low-noise amplifiers (based on the extracted models) and comparison with designs based on conventional transistors in order to fully understand the potential benefits and any associated design trade-offs for mm-wave receiver applications.
Finding: In the world of wireless communication, HEMT’s (High Electron Mobility Transistors) play a critical role in the recent development. Because of the unique property of high power, high frequency, and high gain, it makes a great candidate for military and commercial wireless applications.
For cellar station applications, GaN transistor device is more efficient at higher frequency with broader bandwidth than the Si LDMOS (Silicon laterally diffused metal oxide semiconductor device). Which in terms, give us a higher data transfer rate. Because of the higher bandgap of Gallium Nitride semiconductor material, GaN HEMT is the perfect replacement for the GaAs pHEMTs as it could achieve higher power, higher frequency, and higher bandwidth at the same time.
The goal of our research is to develop a GaN device model as an amplifier that will be able to satisfy our ever-advancing technology needs in the next few decades. As of now, we are in the early development phase where we model our device in the Synopsys Technology Computer-Aided Design (TCAD ) and optimize it in the Advanced Design System (ADS) for higher gain, OIP3, and IIP3 value. The research included doing analytical Figures of Merit for the model device and experimenting with Low Pull simulation as an alternative, more efficient way to get load impedance from the model, which speed up the research progress.