Dual-Polarized Monopulse Radar

Principal Investigator: Professor Pratt
Other Contributors: Luis Perez, Rob Kossler
AWaRE REU Researcher: Patrick Callaghan, Community College of Allegheny County
Project Description: Notre Dame is involved in the development and implementation of target detection and identification concepts for radar applications. Evaluation of these concepts will be assessed experimentally using software-defined radar platforms. The research for the undergraduate student is expected to involve participation in experiments to evaluate one or more radar concepts, depending on project needs. The student will have opportunities to contribute to various facets of the research, including field tests, data analyses, and documentation.
Finding: Monopulse antennas are used in radar to track targets and are also used passively in radio astronomy and in electronic support measures (ESM). In radar applications, monopulse radar is favored for its ratio-based processing—which offers some resilience to jamming—and it conventionally involves single-polarization implementations.
Dual-polarized monopulse concepts, however, are beginning to appear in literature, primarily as a means to augment the monopulse radar’s ability to counter jamming. One example is the paper by Zhang and Pan (“Adaptive Countering Technique for Angle Deception Based on Dual Polarization Radar Seeker”) which deals with monopulse methods enabled by dual-polarization radar architectures to counter angle jamming.
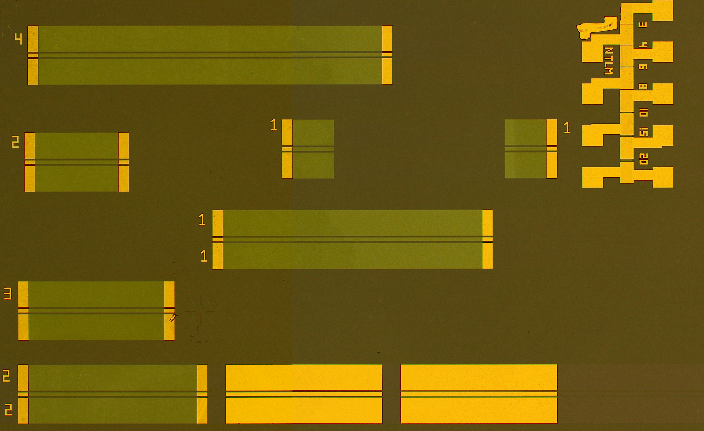
Our goal in the summer research project was to work with data associated with a fabricated monopulse antenna in various tasks, including 1) synthesizing monopulse antenna patterns; 2) implementing monopulse signal processing techniques; 3) modeling and analyzing system responses to simplistic target scenarios, and finally, including dual-polarized methods discussed in literature that aim to improve jamming-resilience.
To work towards these goals, antenna pattern modeling based on recently fabricated dual-polarized monopulse antennas was achieved using an electromagnetic modeling tool called FEKO. The resulting antenna pattern characterizations were exported to MATLAB where sum and difference antenna patterns based on linear combinations of element patterns were synthesized and compared with the FEKO estimates. Additionally, monopulse radar signal processing algorithms were implemented and applied to simplistic single- and two-target scenarios. Plans are to integrate methods from literature to investigate performance in the presence of jamming.